
Magnetický rotační enkodér AS5600, I2C, PWM
Kód: LA131153Doprava zdarma
do výdejních boxů od 1 000 Kč
30 dní na vrácení
pro registrované

30 dní na vrácení
Pro registrované zákazníky

Doprava zdarma do výdejních boxů
Při objednávce nad 1 000 Kč

Prodejem to nekončí
Reklamace řešíme do 5 dnů

Rychlá expedice
Do 24 hodin
Detailní popis produktu
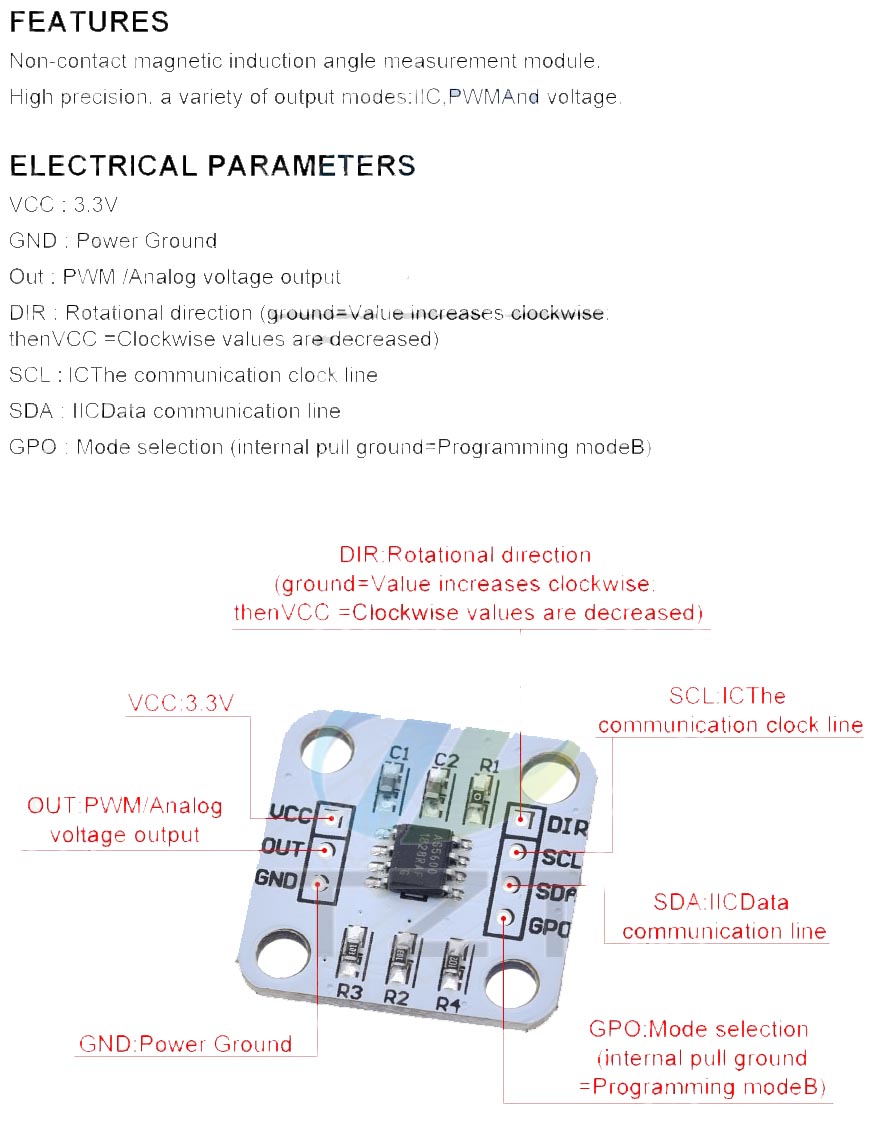
AS5600 je snadno použitelný snímač úhlu polohy v rozsahu 360° se 12bitovým rozlišením. IC měří absolutní polohu rotace magnetu. Skládá se z Hallových senzorů, A/D převodníku a obvodu pro zpracování digitálních signálů. Informace o absolutní poloze magnetu je přímo přístupná přes Ananog / PWM výstup, nebo ji lze číst pomocí standardního I2C rozhraní. To zjednodušuje montáž celého systému, protože nulová poloha magnetu nemusí být mechanicky zaručena. Senzor toleruje nesouosost, kolísání vzdálenosti vzduchové mezery, kolísání teploty a také vnější magnetické pole. Tato robustnost a široký teplotní rozsah činí IC ideálním pro snímání úhlu natočení v průmyslovém a lékařském prostředí.
Specifikace:
- Snímací čip: AS5600
- Napájecí napětí: 3.3V DC
- Logická napětí: 3,3V
- Rozlišení: 12-bit
- Komunikační rozhraní: I2C, Analog a PWM
- Rozsah vzduchové mezery mezi magnetem a snímačem: 0,5-3mm
- Rozsah pracovních teplot: -40-150°C
- Rozměry:
- Modul: 23x23x2mm
- Rozteč otvoru: 15.5x16.2mm
- Ø otvoru: 3.6mm
- Magnet: Ø4x2mm
Součástí dodávky:
- 1ks Magnetický rotační enkodér AS5600, I2C, PWM
- 1ks Magnet
- 1ks 7pin header
Poznámka:
- Tento výrobek není samostatně funkčním celkem a může vyžadovat odbornou montáž.
- Fotografie výrobků jsou pouze ilustracemi na ukázku a někdy se mohou lišit od skutečného vzhledu předmětu. Avšak toto nemění jejích základní vlastnosti.
Doplňkové parametry
| Kategorie: | Pohybová čidla, senzory vzdálenosti a vibrací |
|---|---|
| Záruka: | 2 roky |
| Hmotnost: | 0.003 kg |
| Druh čidla: | Magnetyckého pole |
| Výstup: | I2C, Analogový, PWM |



Hodnocení produktu
Průměrné hodnocení produktu je 5,0 z 5 hvězdiček.
5 hodnocení
5
4
3
2
1
Zanechte hodnocení
Výpis hodnocení
5
JŠ
 Jiří Šrámek
Jiří Šrámek
 Jiří Šrámek
Jiří Šrámek
Skutečně precizní měření úhlu na takové zařízení. Popisované "zadrhnutí" v polohách 0-90-180-270° nebylo pozorováno, možná upgrade výrobce. Pro přímé čtení analogové hodnoty na výstupu OUT není třeba vypajovat příslušný rezistor pull-down, stačí připojit GPO na Vcc. Rozsah na analog. výstupu je pak 0V až Vcc.
5
PN
Přemysl Nos
 Přemysl Nos
Přemysl Nos
Když vyčítám registr ANG, tak při průchodu nulou, kterýmkoliv směrem, se jakoby na cca 5~7 LSB zadrhne.
Jinak OK
5
JB
Josef Brádler
 Josef Brádler
Josef Brádler
Originální produkt na 3.3v po odpájení R1 odporu na 5v. Komunikuje přes knihovnu Při zapojení na VCC/5v GND/zem DIR/zem SDA/A4 SLC/A5. Kod dle https://curiousscientist.tech/blog/as5600-magnetic-position-encoder funguje. Výstupem je hodnota 0-4095 pro přepočítání na stupně nutno násobit 0.087890625 Tato hodnota je dána pozicí magnetu proto i po zapnutí není poloha nulová. Má problém při krajních úhlech 0/360, 90, 180, 270 v těchto bodech občas hodí nesmyslné hodnoty. To např. znamená že mezi 4095 a 0 hodí náhodně 255 nebo 3840 atd. Testováno při zapojení na 5v i na 3,3 přes převodník úrovní. Nutné tuto chybu kompenzovat. Samotné vyčítání hodnoty trvá zhruba 250 microsecond tedy 0,25milisekund. což je dostatečné. Kvůli času výpočtu doporučuji převod na stupně provádět až ve chvíli kdy to potřebujete, nedělat je po každém odečtu. Jinak je to kvalitní produkt za rozumnou cenu.
5
JG
Jan Grestenberger
 Jan Grestenberger
Jan Grestenberger
Použito pro analogový výstup, snímá to polohy otevření klapek s výstupem na indikační voltmetr. Je to mnohem jednoduší než mechanické řešení snímaní polohy i cenově.
5
PV
Pavel Vachal
 Pavel Vachal
Pavel Vachal
Dodání rychlé bez problémů. Snímač komunikuje přes I2C bez problémů, k aktivaci analogového napěťového výstupu je třeba buď provést naprogramování konfiguračního slova a nebo, pokud postačuje rozsah 0-360 deg pro plný Vcc rozsah, stačí vyletovat přizemňovací odpor na GPO pinu 5. Z dokumentace výrobce to není zcela zřejmé.
Diskuze
Výpis diskuzí
 Schéma zapojení PCBA
Schéma zapojení PCBA
Tady je pravděpodobně schéma této PCBA:
https://uge-one.com/wp-content/uploads/2025/10/AS5600-Circuit.jpg
R
PWM/napětí
Rob
 PWM/napětí
Rob
PWM/napětí
Rob
- pro odečítání pomocí OUT je potřeba odpájet R1, jinak je pin neaktivní
- implicitně je pak OUT nastaven jako napěťový výstup
- pro PWM lze provést, změnu pomocí tohoto programu, ale asi pouze jednou!
#include
const int SENSOR_ADDRESS = 0x36;
const byte CONF_REG_HIGH = 0x07;
void setup() {
Serial.begin(9600);
Wire.begin();
Serial.println("Start konfigurace senzoru AS5600 na PWM...");
// Přečtení původní konfigurace
Wire.beginTransmission(SENSOR_ADDRESS);
Wire.write(CONF_REG_HIGH);
Wire.endTransmission();
Wire.requestFrom(SENSOR_ADDRESS, 2);
byte conf_h = Wire.read();
byte conf_l = Wire.read();
// Nastavení bitů OUTS[1:0] na hodnotu "10" pro PWM
byte new_conf_l = (conf_l & 0b11001111) | 0b00100000;
// Zápis nové konfigurace
Wire.beginTransmission(SENSOR_ADDRESS);
Wire.write(CONF_REG_HIGH);
Wire.write(conf_h);
Wire.write(new_conf_l);
Wire.endTransmission();
delay(100);
// Ověření
Wire.beginTransmission(SENSOR_ADDRESS);
Wire.write(CONF_REG_HIGH);
Wire.endTransmission();
Wire.requestFrom(SENSOR_ADDRESS, 2);
Wire.read(); // Ignorujeme vyšší byte
byte verify_conf_l = Wire.read();
if ((verify_conf_l & 0b00110000) == 0b00100000) {
Serial.println("ÚSPĚCH! Senzor je nyní nastaven do režimu PWM.");
} else {
Serial.println("CHYBA: Nastavení se neuložilo.");
}
}
void loop() {
// Prázdný loop, program se provede jen jednou.
}
R
Oprava
Rob
Oprava
Rob
Neměl jsem brýle, je to R4
L
Kolize HW
Luděk
 Kolize HW
Luděk
Kolize HW
Luděk
Zdravím, mám dotaz a nechápu to.
Mám připojen TFT Display - na pinech 8,9,10,11 a 13 - tedy ISP
Ale jakmile připojím knihovnu AS5600 displej nejde.
Máte nějakou radu?
MF
Kolize HW
Martin Frajdl
 Kolize HW
Martin Frajdl
Kolize HW
Martin Frajdl
Dobrý den, bohužel s touto kombinací zkušenosti nemáme.
M
REAKCE
Milan
 REAKCE
Milan
REAKCE
Milan
Josef Brádler
Má problém při krajních úhlech 0/360, 90, 180, 270 v těchto bodech občas hodí nesmyslné hodnoty. To např. znamená že mezi 4095 a 0 hodí náhodně 255 nebo 3840 atd. Testováno při zapojení na 5v i na 3,3 přes převodník úrovní. Nutné tuto chybu kompenzovat.
==== Jedná se o nezvládnutí šumu, tedy nejde o objektivní problém. Ale problém výrobce.
Jinak je to produkt za rozumnou cenu. Souhlas
J
Filtrace občasných náhodných hodnot
Jirka
 Filtrace občasných náhodných hodnot
Jirka
Filtrace občasných náhodných hodnot
Jirka
Pokud to občas znamená, že se jedná jen o ojedinělá čtení v takovém případě udělat vždy třeba pět čtení bezprostředně po sobě. Z těch pěti čtení vypustit nejmenší a největší hodnotu a ze zbylých tří hodnot udělat průměr.
J
JR
 JR
JR
Můžete mi prosím někdo přiblížit, jak tohle kompenzovat? Jak detekovat chybnou hodnotu?