
HY Driver HY-DIV268N-5A Toshiba TB6600 pro krokové motory 5A 42V
Kód: LA143032Doprava zdarma
do výdejních boxů od 1 000 Kč
30 dní na vrácení
pro registrované

30 dní na vrácení
Pro registrované zákazníky

Doprava zdarma do výdejních boxů
Při objednávce nad 1 000 Kč

Prodejem to nekončí
Reklamace řešíme do 5 dnů

Rychlá expedice
Do 24 hodin
Detailní popis produktu
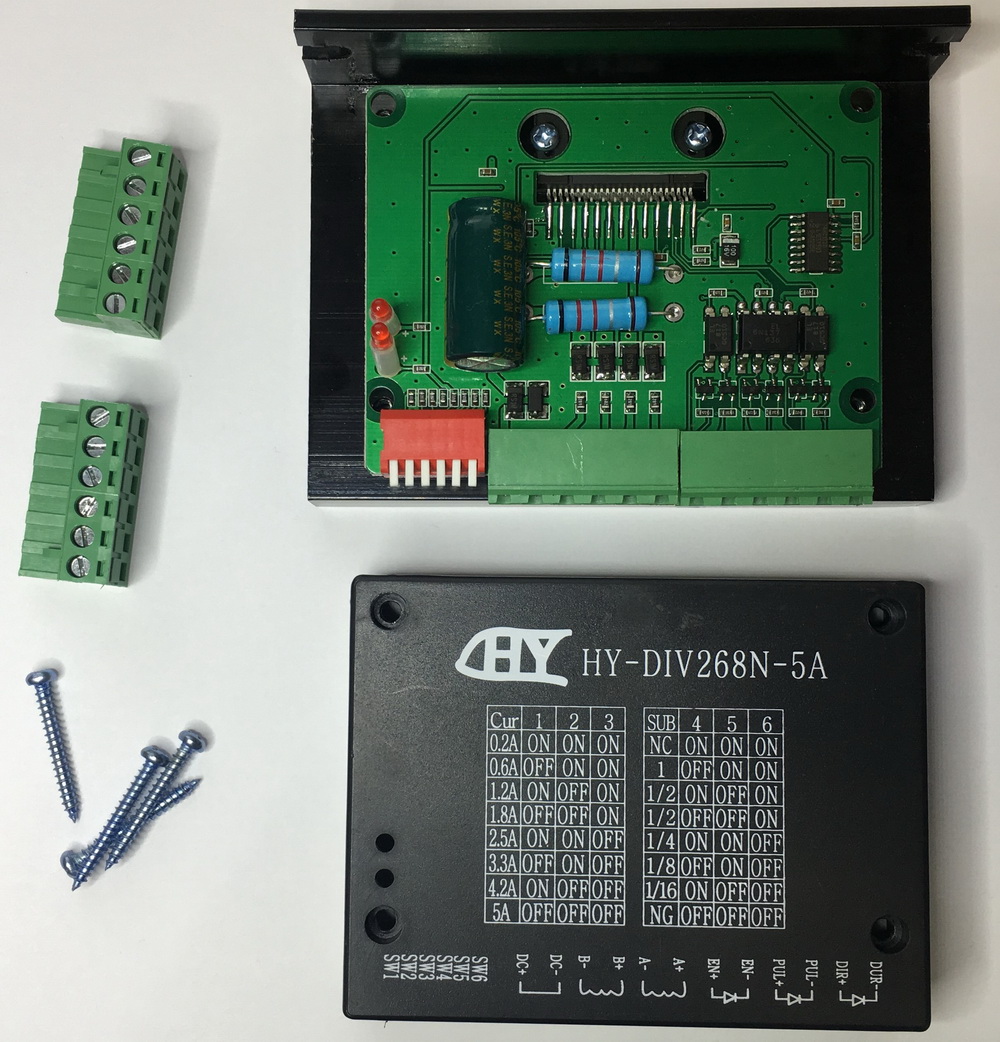
Modul je určen pro řízení jednoho bipolárního krokového motoru signály PUL a DIR. Obsahuje obvody pro mikrokování a zmenšení pracovního proudu při nečinnosti, které omezí přehřívání motoru.
Může být použit s jakýmkoliv motorem do rozměru NEMA23.
Parametry:
- Rozsah napájecího napětí: +8 až 42V (stejnosměrné)
- Doporučené pracovní napětí: max. +36V
- Maximální výstupní proud: 5A
- Doporučený výstupní proud: 4A
- Nastavení proudu
- Stacionární proud je automaticky snížen o polovinu
- Ochrana podpěťová, nadproudová, tepelná a proti zkratu na výstupu
- Celkový odpor v sepnutém stavu (Ron) = 0,4 Ω (typ.)
- Mikrokrokování: 1/2, 1/4, 1/8 a 1/16 základního kroku
- Maximální vstupní napětí všech vstupů: +5.5V
- Maximální frekvence na vstupu PUL: 200kHz
- Vestavěné pull-down rezistory na vstupech: 100 kΩ (typ.)
- Velikost: 91x76x36mm
- Váha: 156g
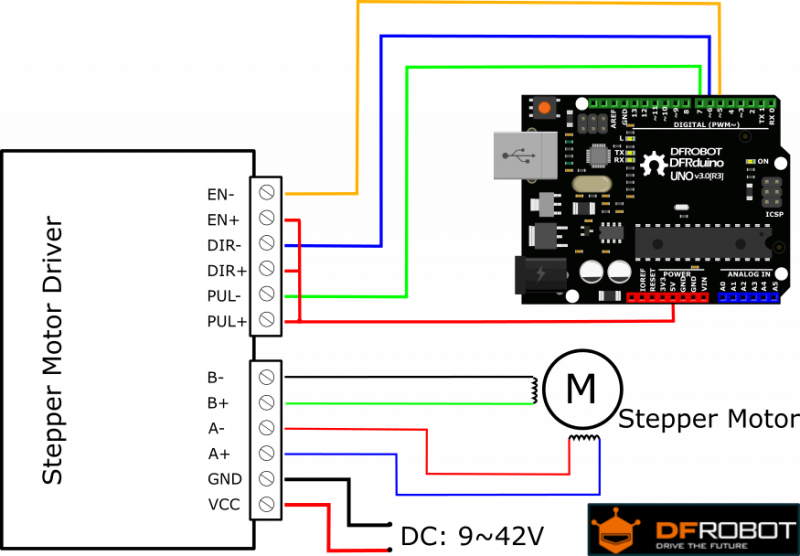
Zapojení
Součástí dodávky:
- 1ks HY Driver HY-DIV268N-5A Toshiba TB6600 pro krokové motory 5A 42V
Poznámka:
- Tento výrobek není samostatně funkčním celkem a může vyžadovat odbornou montáž.
- Fotografie výrobků jsou pouze ilustracemi na ukázku a někdy se mohou lišit od skutečného vzhledu předmětu. Avšak toto nemění jejích základní vlastnosti.
Doplňkové parametry
| Kategorie: | Řadiče a drivery pro motory |
|---|---|
| Záruka: | 2 roky |
| Hmotnost: | 0.244 kg |



Hodnocení produktu
Průměrné hodnocení produktu je 3,0 z 5 hvězdiček.
1 hodnocení
5
4
3
2
1
Zanechte hodnocení
Výpis hodnocení
3
Z
 Zdeněk
Zdeněk
 Zdeněk
Zdeněk
Ať zvenku tyto typy driverů vypadají vždy stejně, uvnitř se liší el. zapojením pomocné elektroniky okolo hlavního obvodu TB6600. Ze 4 koupených driverů byly zcela totožné pouze 2. Nakupoval jsem v několika měsíčních rozestupech ve dvou e-shopech.
Našel jsem tyto odlišnosti:
- různě řešené ovládací vstupy EN, PUL, DIR (vyžadující/nevyžadující předřadný rezistor, vstupy jsou realizovány optočleny s nebo bez obvodu omezení proudu diodou optočlenu, různé typy optočlenů)
- různě řešený obvod pro omezení proudu fázemi motoru (když se nekrokuje, proud fázemi motoru klesne na 30 %)
- různé hodnoty v odporovém děliči na pinu VREF TB6600 pro nastavení proudu fázemi motoru
- (ne)přítomnost externích rychlých výběhových diod na výstupech A+,A-,B+,B- . Jeden driver neměl tyto diody vůbec, zbylé 3 drivery měly osazeny jen spodní diody (vůči GND). Pro dokonalou (plnou) ochranu obou H-můstků integrovaných v TB6600 by bylo potřeba 8 těchto diod, 4 pro každý H-můstek. Výrobce v datasheetu neuvádí zda TB6600 obsahuje integrované výběhové diody, ale měřením jsem zjistil, že ano, takže je otázka, zda jsou externí diody nutné.
- (ne)kvalita osazení PCB součástkami (křivě zapájené) a kvalita jejich zapájení
Driver nabízený na tomto eshopu:
- V přívodu napájení (svorka DC+) je ochranná dioda proti přepólování.
- Ovládací vstupy EN, DIR, PUL obsahují omezovač proudu (zdroj proudu) nastavený na 20 mA, takže tyto vstupy lze spínat přímo napětím od cca 2 V výše bez předřadného rezistoru.
- Povel "udělej krok" se realizuje sestupnou hranou na svorce PUL (vypnutí proudu svorkou PUL).
- Tabulka s výběrem proudu fázemi krokového motoru (SW1, SW2, SW3) neodpovídá realitě.
Naměřil jsem:
SW1 SW2 SW3 Proud napsaný na víčku Skutečný špičkový proud Skutečný ustálený proud
ON ON ON 0,2A 0,38A 0,1A
OFF ON ON 0,6A 1,42A 0,41A
ON OFF ON 1,2A 2,16A 0,62A
OFF OFF ON 1,8 A 2,7A 0,78A
ON ON OFF 2,5A 3,36A 0,98A
OFF ON OFF 3,3A 3,66A 1,08A
ON OFF OFF 4,2A 3,88A 1,16A
OF OFF OFF 5A 4,08A 1,22A
Proudy jsem měřil proudovými kleštěmi Fluke i30s připojenými k osciloskopu.
- Driver obsahuje rychlé výběhové diody na výstupech A+,A-,B+,B-, ale má jen spodní diody (vůči GND). Horní diody opřené vůči napájecímu napětí chybí.
- Obvod pro snížení proudu fázemi motoru, když se nekrokuje, je špatně zapojen. U MKO 74HC123, který tuto funkci realizuje, jsou prohozené piny A, B, takže, když místo, aby se proud po povelu "udělej krok" (přechod z HIGH na LOW na svorce PUL) na okamžik (cca 2,5 ms) zvýšil na 100 %, tak zůstává na úrovni 30 % a až po dokončení kroku (přechodu z LOW na HIGH na svorce PUL) zvýší proud na 100 % na 2,5 ms, což už je ale k ničemu. Viz dále.
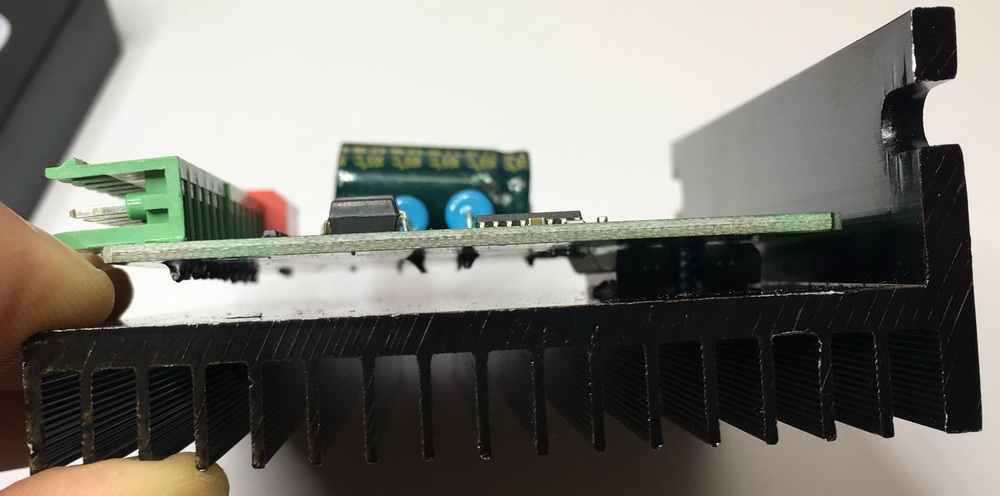
- Kvalitně osazený plošňák, kvalitně zapájeno.
- Mírně ohnutý chladící L-profil ve spodní části, kde je vybrání pro šroubek.
Driver je použitelný.
Abych to shrnul, všechny 4 kusy driverů, které se mi dostaly do ruky (včetně tohoto z laskarduino.cz) trpí těmito neduhy:
- tabulka s výběrem proudu motoru natisknutá na driveru je špatná, proudy neodpovídají skutečnosti
- logika enablovacího vstupu EN je nešťastná, driver je odblokován, když do vstupu EN neteče proud (z hlediska bezpečnosti by mělo být opačně)
- u 3 ze 4 driverů (včetně tohoto z laskarduino) byl špatně řešen obvod, který zajišťuje pokles proudu fázemi motoru (resp. boost proudu ze 30 na 100 % na začátku kroku). Buď jsem to nepochopil jak má tento obvod fungovat nebo je to opravdu špatně zapojené. U driverů používajících MKO 74HC123 lze toto poměrně jednoduše opravit (přepojení vstupů A, B na 74HC123 - vstup B připojit na výstup optočlenu PUL, vstup A uzemnit).
Diskuze
Buďte první, kdo napíše příspěvek k této položce.